





၏အားသာချက်များlinear လမ်းညွှန်များ:
1 မြင့်မားသောတိကျမှု- Linear လမ်းညွှန်များသည် မြင့်မားသောထုတ်ကုန်အရည်အသွေးနှင့် တိကျမှုလိုအပ်သော အပလီကေးရှင်းများအတွက် သင့်လျော်သော တိကျမှုမြင့်မားသော ရွေ့လျားမှုလမ်းကြောင်းများကို ပေးစွမ်းနိုင်ပါသည်။
2. မြင့်မားသော တောင့်တင်းမှု- မြင့်မားသော မာကျောမှုနှင့်အတူ၊ ၎င်းသည် စက်ပိုင်းဆိုင်ရာ စနစ်များ၏ တည်ငြိမ်မှုကို ထိန်းသိမ်းနိုင်ပြီး ကြီးမားသော ဝန်နှင့် သက်ရောက်မှုအား ခံနိုင်ရည်ရှိသည်။
3. မြန်နှုန်းမြင့်- မြန်နှုန်းမြင့် ရွေ့လျားမှုကို ပံ့ပိုးပေးပြီး လျင်မြန်သော နေရာချထားနိုင်စွမ်းကို ပံ့ပိုးပေးသည်၊ အလိုအလျောက် ထုတ်လုပ်မှုလိုင်းများ၊ အမြန်ထုပ်ပိုးမှု စက်ယန္တရားများ စသည်တို့ကဲ့သို့ လျင်မြန်သော နေရာချထားမှု လိုအပ်သော အပလီကေးရှင်းများအတွက် သင့်လျော်ပါသည်။
4. ပွတ်တိုက်မှုနည်းသည်။: rolling contact method ကို ကျင့်သုံးခြင်းဖြင့် ပွတ်တိုက်မှု ဆုံးရှုံးမှု နည်းပါးပြီး၊ လည်ပတ်မှု စွမ်းဆောင်ရည်ကို မြှင့်တင်ပေးပြီး စွမ်းအင် သုံးစွဲမှုကို လျှော့ချပေးသည်။
5. ထိန်းသိမ်းရလွယ်ကူသည်- ဖွဲ့စည်းတည်ဆောက်ပုံသည် ရိုးရှင်းပြီး ပြုပြင်ထိန်းသိမ်းမှုနှင့် ထိန်းသိမ်းမှုမှာ အတော်လေးလွယ်ကူသည်၊ ယေဘုယျအားဖြင့် ပုံမှန်ချောဆီနှင့် သန့်ရှင်းရေးကိုသာ လိုအပ်သည်။
6. ရှည်လျားသောဝန်ဆောင်မှုသက်တမ်း- လှိမ့်ပွတ်တိုက်မှုကြောင့်ရရှိသောသေးငယ်သောပွတ်တိုက်အားကြောင့်၊ ဝါယာရထားသည် ဂီယာထိရောက်မှုနှင့် ဝန်ဆောင်မှုသက်တမ်းအတွက် hard rail ထက် များစွာပို၍စံပြပါသည်။
7. ပြုပြင်ထိန်းသိမ်းမှုကုန်ကျစရိတ်နည်းပါးခြင်း- ပုံမှန်အစိတ်အပိုင်းတစ်ခုအနေဖြင့်၊ ခြေရာခံအစားထိုးပုံစံသည် ဝက်အူကို အစားထိုးခြင်းနှင့် ဆင်တူသောကြောင့် ပြုပြင်ထိန်းသိမ်းမှုအဆင်ပြေစေပါသည်။
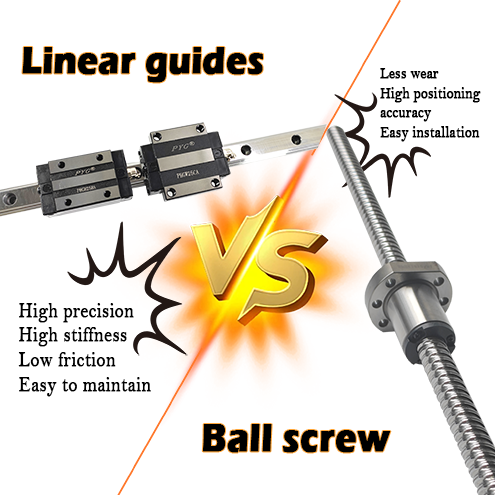
Ball screw ၏အားသာချက်များ
1 High positioning တိကျမှု- linear guides အဖြစ် linear guides ကိုအသုံးပြုသောအခါ၊ rolling friction ကြောင့် friction coefficient လျော့နည်းသွားပြီး အလွန်တိကျသော high precision (um) level positioning accuracy ကိုရရှိနိုင်ပါသည်။
2. ဝတ်ဆင်မှုနည်းသည်- ၎င်းသည် အချိန်ကြာမြင့်စွာ တိကျမှုကို ထိန်းသိမ်းထားနိုင်ပြီး လှည့်ပတ်လမ်းညွှန်မှု၏ ဝတ်ဆင်မှုသည် အလွန်သေးငယ်သောကြောင့် စက်သည် တိကျမှုကို ကြာရှည်စွာ ထိန်းသိမ်းထားနိုင်သည်။
3. တပ်ဆင်ရလွယ်ကူခြင်း- ဝက်အူတပ်ဆင်ခြင်းသည် အထူးရိုးရှင်းသည်၊ တပ်ဆင်မှုပြီးမြောက်ရန် စက်ကိရိယာ၏ ပုံသေဘောင်တွင် ဝက်အူကို ပြုပြင်လိုက်ရုံပါပဲ။
ပို့စ်အချိန်- Nov-21-2024



